TLDR
INTRODUCTION
One day superintelligence will exist, and it will be vastly more capable than you or me. It will be better at reasoning, planning, and computation, by potentially multiple orders of magnitude. It hopefully will also be willing to help us. There is just one problem: we cannot understand a word it says.
This will not be a failure of translation, but instead something more fundamental. Language, as humans use it, has been shaped by the human experience: by embodiment, by social history, by the particular pressures of communication among minds of roughly equal capacity. Superintelligence will be shaped by none of these. Its internal representations will be optimized by processes with no legibility requirement, and there is no reason to expect them to decompose into words, sentences, or any structure legible to us. There is no reason to think of this as a worst-case scenario. It is, if anything, the default scenario. One way this scenario could occur, is if frontier labs are able to fully automate AI research. From that point forward, natural language autoregression could end.
On the subject of AI alignment, we are accustomed to asking: does it want to help us, or not? If it does, we expect the appropriate communication to follow; if it doesn’t, we prepare for conflict. But superintelligence introduces a third case, which our usual frameworks for communication and AI alignment are not necessarily built for. Consider an agent that is genuinely, fully cooperative — that has computed exactly the right answer and wants nothing more than to convey it — and yet whose outputs arrive as an opaque stream of symbols we cannot parse. In this case, the alignment question branches into two. First, the problem of getting the AI to want the right things, and second, the problem of being able to use it once it does.
This post is about the latter: how does a weaker agent extract useful behavior from a stronger one it cannot understand?
It turns out questions of this sort have been studied formally, and the answer is more optimistic than one might expect. A line of work by Juba and Sudan (STOC 2008) and Goldreich, Juba, and Sudan (JACM 2012) develops a formal theory of goal-oriented communication between agents with no common language (collectively referred to as JSG). Their main result is that the boundary of what the weaker agent can achieve is determined entirely by its ability to verify outcomes.
In this post, I draw on their framework and propose an experiment that makes it concrete. A Superintelligence encodes the correct answer to the Human's problem in an unknown language. The Human cannot read the message directly, but can observe whether acting on it brings him closer to his goal. Using this feedback alone — with zero knowledge of the encoding — the Human learns an interpreter. Not by decoding the language per se, but by learning a goal-oriented translation, where specific translation is secondary to achieving the goal.
The Human's goal is modelled as a simple graph traversal problem known as s-t connectivity: find a path from node s to node t in a large directed graph. Superintelligence knows the graph and provides navigational advice, encoded in its unknown language. I model the space of possible unknown languages using finite state transducers with a tunable complexity parameter (more on this later). The Human's interpreter is trained via reinforcement learning with verifiable rewards (RLVR), where the reward signal is simply whether each step brings the Human closer to the target.
What follows, and the the questions we seek to answer
In the remainder of this post, I’ll introduce the JSG setup further, and make the connection to our language alignment problem crystal clear. After that, I’ll describe in detail our conceptual setting in which we operationalize their ideas. We seek answers to the following questions:
- Does the consistency of the language of Superintelligence matter more than its correctness? Superintelligence can encode the right answer every time and still be unlearnable, if her encoding changes unpredictably between episodes.
- Does the difficulty of interpretation scale with the size of the Human's state space (i.e., the graph), or is the bottleneck in the language itself — independent of how large the graph is?
- What happens when Superintelligence is not merely unintelligible but occasionally wrong, sending a bad token with some probability? Is there a threshold of unreliability beyond which interpretation breaks down entirely?
- What if the problem is not Superintelligence’s message but the human’s own ability to evaluate progress — if the feedback signal itself is noisy or coarse?
- How complex can Superintelligence’s language be before it becomes unlearnable? The model for the unknown Superintelligence language that we propose has an intuitively adjustable complexity parameter; how far can that be pushed?
- How does the difficulty of interpretation scale with the number of choices the Human faces at each step?
Juba, Sudan, and Goldreich
The JSG setup involves two agents, in this context referred to as Alice and Bob, who interact within a shared environment. Bob has a goal. Alice is potentially helpful, meaning there exists some protocol by which Bob could use Alice to achieve this goal. Bob does not know Alice’s protocol. He does not know which Alice, from a large class of possible Alices, he is talking to. He must succeed anyway.
The key concept in the original Juba-Sudan paper is verifiability: whether Bob can check if his goal was achieved. In the extended Goldreich-Juba-Sudan version, this is refined into sensing — Bob’s ability to detect whether he is making progress, not merely whether he succeeded at the end.
The main theorem states that if Bob can sense progress, he can achieve his goal with any helpful Alice, despite sharing no language. The proof is constructive. Bob enumerates candidate interpreters, which are possible protocols for interacting with Alice, tries each one, uses his sensing function to detect failure, and moves to the next. Eventually he finds one that works. This is a brute force search.
Goldreich, Juba, and Sudan extend this in ways that matter for alignment. Goals are defined over infinite, multi-session interactions rather than one-shot tasks. The central result, across both papers, remains the verifiability boundary. That is, Bob can achieve any goal whose achievement he can sense progress towards, and nothing beyond. For alignment, the implication is that humans can benefit from superintelligent AI exactly to the extent that they can sense progress towards their goal. The aspects of Superintelligent AI behavior that escape this sensing constitute a structural blind spot that no interpreter, however sophisticated, can close.
From enumeration to reinforcement learning
The theoretical framework of JSG proves that universal communication is possible. However, the mechanism by which it does so (enumeration of candidates) is completely impractical. The Human is supposed to enumerate all possible interpreters — all programs in some complexity class — and test each one. This is similar to a “Levin universal search,” where runtime is exponential in the description length of the correct interpreter. JSG acknowledge this, but their main contribution is characterization, not engineering. That is, they identify what exactly is achievable, and leave the question of practical construction open.
A natural replacement for enumeration is learning. Instead of cycling through interpreters in lexicographic order, the Human could learn to propose good interpreters, guided by the sensing signal. In my view, this amounts to a reinforcement learning loop, where the interpreter is a parameterized model mapping Superintelligence’s outputs to the Human’s actions; the sensing function provides reward; the interpreter updates its parameters to maximize reward over episodes.
Departing from enumeration of interpreters to learning interpreters will forgo universality in favor of tractability. While JSG show that brute search is guaranteed to find a working interpreter for any helpful Superintelligence (given enough time), a learned interpreter will converge quickly for Superintelligences that resemble its training distribution and may fail for sufficiently alien ones. However, the interpreter can be learned anew for each interaction.
Overall, the insight of JSG survives the shift from theoretical search to learning. The sensing signal is what makes learning possible. Without it, the interpreter has no training signal, and no amount of network capacity helps. Hence, verifiability remains the foundation that makes interpretation of Superintelligence possible.
NOTE: The connection to current machine learning practice is direct. Reinforcement learning with verifiable rewards (RLVR) — the paradigm behind recent reasoning models — operates on exactly the same principle: when the correctness of an output can be checked automatically, that check becomes a powerful training signal, without any need for human annotation or labeled data. JSG’s verifiability condition is, in this sense, a theoretical anticipation of why RLVR works. Our experiment is a concrete instance of it: the sensing function is a verifiable reward, and the RL loop is the practical mechanism by which the Human learns to interpret Superintelligence’s alien language. In fact, one can view this setting as an inversion of the usual RLVR paradigm. Rather than humans providing verifiable rewards to train the AI, the AI provides knowledge and the human uses verifiable rewards to train himself to interpret it. The roles of teacher and learner are swapped, even if the verifiable reward remains the mechanism that makes learning possible.
The experiment: navigation of a directed graph from superintelligence with unknown language
To make these ideas concrete and testable, I now propose the following scenario.
The Human's space of possible actions it can take towards its goal, or environment as JSG call it, is a large, fixed, directed graph \(G = (V, E)\) with \(n\) nodes. We choose the graph at random, on the condition that each node has exactly \(d = 4\) outgoing edges to randomly chosen neighbors (by default, we use \(d=4\) and \(n=10,000\), but we vary these in our experiments). This is a \(d\)-regular directed random graph: every node has the same out-degree, and neighbors are drawn uniformly at random. The graph is generated once and remains fixed throughout the experiment; a model for transitioning from state to state in the world.
The abstraction is deliberately general. It is meant to abstract an application like a mathematical proof (a path from axioms to a theorem through valid inference steps), or an agentic task (a path from the current world state to a goal state through available actions, like getting a printer to work on wifi). The \(d\)-regularity means every decision point offers exactly \(d\) choices, which simplifies the model without losing the essential structure. The fixed randomness means the constraint structure exists independent of what anyone wants.
Superintelligence knows the full graph. At the start of each episode, it computes the shortest path from source \(s\) to target \(t\) and encodes it as a sequence of direction tokens — one per step — in its unknown language. Superintelligence sends the whole sequence at episode start and does not adapt to the Human’s movements. This models “one-shot” advice: the AI provides its best guidance upfront, and the Human must execute on it.
The Human receives Superintelligence’s token sequence and attempts to traverse the graph from \(s\) to \(t\). At each step \(i\), the Human observes the current token \(\tau_i\) from the sequence. The token cannot be read directly. Instead, the Human has a learned interpreter — a small neural network that maps the current token, the normalized distance to the target, and progress through the horizon to a probability distribution over the \(d\) outgoing edges. An action is taken, the Human moves to the next node, and the environment emits a reward signal based on progress.
The learning process is as follows. The Human plays episodes against the environment. Each episode, the Human follows the current interpretation of Superintelligence’s directions, observes the outcome, and updates the interpreter via PPO. Superintelligence is not involved in this loop — it gives its directions once, upfront. The Human is trying different interpretations of the same type of message, learning from environmental feedback which interpretation leads toward the goal.
This setup isolates the core phenomenon cleanly, because the Superintelligence is helpful — its directions encode a valid path. Meanwhile, the goal is verifiable, since the Human knows whether the target was reached, and can measure distance from it at every step. On the other hand, it is only the language that is unintelligible. Therefore, the question asked by this experiment is whether the Human can learn a working interpreter purely from the sensing signal, with zero linguistic knowledge of Superintelligence’s encoding.
Implementation
The experiment is organized around five components that mirror the theoretical roles in the Juba-Sudan framework: the graph environment, the oracle (Superintelligence), the sensing function, the interpreter model (the Human’s policy), and the RL training loop.
The graph environment
The graph environment is constructed as follows. We construct a \(d\)-regular directed random graph: each of the \(n\) nodes is assigned exactly \(d\) outgoing edges, chosen uniformly at random without replacement from all other nodes (by default, we use \(d=4\) and \(n=10,000\), but we vary these in our experiments). The graph is seeded and fixed for the entire experiment — it represents the stable structure of the task domain, not something that varies per episode.
The distance oracle is built as follows. A pool of \(T = 1024\) target nodes is sampled uniformly at random. For each target, a full reverse-BFS from that target computes the exact shortest-path distance from every node in the graph to that target. This creates approximately 10,000,000 \((s,t)\) pairs per graph. The distances are then stored in a \(T \times n\) matrix. This precomputation is done once at startup and is invisible to the Human — it exists to give Superintelligence perfect knowledge and to compute the Human’s sensing reward.
Each training episode is a fresh \((s, t)\) pair drawn from this pool: a target is sampled from the 1024 precomputed targets, then a source is sampled uniformly from nodes that can reach that target in at least one step. The episode horizon is \(2 \cdot \text{dist}(s, t)\), giving the Human twice the optimal budget.
Superintelligence’s language
Superintelligence’s core operation is: given the shortest-path action sequence \((a_1, \ldots, a_L)\) from \(s\) to \(t\) — where each \(a_i \in \{0,\ldots,d-1\}\) indexes the outgoing edge to follow at step \(i\) — it encodes the sequence into tokens \((\tau_1, \ldots, \tau_L)\) and sends them to the Human before the episode begins.
The FST language model. We model Superintelligence’s encoding as a finite state transducer with \(K\) states. At initialization, \(K\) permutations \(\pi_0, \pi_1, \ldots, \pi_{K-1}\) are sampled uniformly at random, each a bijection \(\pi_k : \{0,\ldots,d-1\} \to \{0,\ldots,d-1\}\). These permutations are fixed for the entire training run. At position \(i\) within a message, Superintelligence applies the permutation corresponding to the current FST state:
\[\tau_i = \pi_{(i-1) \bmod K}(a_i), \qquad i = 1, \ldots, L\]
The FST has two limiting cases that bracket the difficulty of the learning problem:
- \(K = 1\): All tokens are produced by the same permutation \(\pi_0\), at every step of every episode. The mapping is maximally consistent — token \(\tau\) always denotes the same action, regardless of position or episode. This is the fixed permutation, and the easiest case for the Human to learn.
- \(K \gg L\): Each step within a message uses a distinct permutation, never repeating within an episode. The sequence of ciphers is still consistent across episodes (the same \(K\) permutations are reused in the same cyclic order), but the within-episode pattern is maximally complex. As \(K\) grows beyond the typical message length, interpreting any single token requires knowing its position in the message.
\(K = \infty\). Abusing notation, an FST with infinitely many states can be viewed as the language where the permutation cipher is randomized at every step (fresh permutation). At the start of each episode, a new random permutation is drawn, which is equivalent to advancing to a state never visited before. In this sense, the FST framework unifies the entire spectrum: \(K = 1\) is the fixed permutation, finite \(K\) is the FST proper, and \(K = \infty\) is the fresh permutation. As \(K\) grows, the language becomes harder to interpret — not because individual messages are harder to follow, but because the cross-episode consistency that allows the Human to accumulate a reliable mapping gradually disappears. \(K\) therefore is a very natural complexity measure for the class of unknown languages. At \(K = \infty\), the cipher itself cannot be learned across episodes; what small signal remains comes from learning the structure of the graph itself, which is independent of the language.
Control conditions. Two additional baselines serve as lower bounds:
- Random message: Superintelligence ignores the optimal path entirely and sends a uniformly random token sequence. The message carries zero information about the correct actions.
- No oracle: Superintelligence sends nothing. The Human receives a null token at every step and must navigate without any guidance.
The Human’s interpreter
In our implementation,PolicyValueNet is a two-headed MLP that serves as both policy and value function. The input at each step is:
- A token embedding: the current token \(\tau_i \in \{0,\ldots,\sigma\}\) (with \(\sigma+1\) as the null-token index when no message is sent) is embedded via a learned \((\sigma+1) \times 16\) embedding table.
- A distance feature: the Human’s current shortest-path distance to \(t\), normalized by \(n\) and clipped to \([0, 1]\). This is the Human’s sensing information — always knowing how far from the goal.
- A step fraction: \(i / H\), where \(H\) is the episode horizon. This lets the policy account for urgency.
These three inputs are concatenated into an 18-dimensional vector and passed through two fully-connected layers with tanh activations (hidden dimension 256). The policy head outputs logits over \(d = 4\) actions; the value head outputs a scalar estimate of the return.
Note what is not in the input: there is no encoding of which node the Human is currently at. The model cannot look up a node-specific table. It must infer the correct action purely from the token, the distance signal, and the step count. With the fixed permutation (\(K=1\)), this works because Superintelligence’s cipher is a permutation of action indices: token \(\tau\) maps to the same action index across all nodes. The model can learn this fixed mapping without any node-specific information.
Crucially, the active FST state is latent: the model is not given a modulo-\(K\) phase, clock index, or any other direct identifier of which permutation is currently active. It must infer that hidden state from sequence history and reward feedback.
For \(K > 1\), the MLP architecture is insufficient: since the correct interpretation of a token depends on its position \(i\) within the message (and hence on which of the \(K\) ciphers is currently active), the model needs to track state across steps within an episode. For these experiments, the MLP is replaced with a GRU, whose hidden state can maintain a running summary of position in the FST cycle.
The sensing function
The primary sensing condition is dense sensing: at each step, the Human receives a reward of \(\text{dist}(v_\text{old}) - \text{dist}(v_\text{new})\) (the one-step distance reduction, clipped to \([-1, 1]\)), plus a terminal bonus of \(+1\) upon reaching \(t\). This is the richest possible feedback — the Human knows after every single action whether they moved closer or farther.
As a baseline, we also run sparse sensing: the Human receives \(+1\) only if \(t\) is reached within the horizon, and \(-0.01\) per step otherwise. This is nearly terminal-only feedback, corresponding to a Human who cannot evaluate intermediate states and only learns whether the whole episode succeeded. S1 tests how much of the learning depends on dense per-step progress signals, and how much survives with minimal oversight.
RL training
Training uses PPO with generalized advantage estimation (GAE). \(n_\text{env} = 32\) parallel environments step simultaneously; every 64 environment steps, the collected rollout is used to update the policy via 4 epochs of PPO with 4 minibatches, clip ratio \(\epsilon = 0.2\), entropy coefficient \(0.01\), value coefficient \(0.5\), and gradient clipping at \(0.5\). The optimizer is Adam with learning rate \(3 \times 10^{-4}\).
Success rate is tracked as a running average over the last 500 completed episodes.
Experiment Details
All results below are from runs with \(K = 1\) (the fixed permutation cipher) as the default FST setting, \(n = 10{,}000\) nodes, \(d = 4\). Each condition is averaged over 30 random seeds; shaded bands show the 95% confidence interval. Variance across seeds reflects two sources of randomness: the stochasticity of the training process itself, and the fact that each seed instantiates a new random graph, new random permutation ciphers, and new weight initializations. Some of the variance in final performance — particularly visible in Experiment 5 — may therefore reflect genuine differences in graph difficulty across seeds, not just optimization noise. In all plots, the success rate at each episode is a running average over the previous 500 completed episodes.
Experiment 1: Does consistency matter more than correctness?
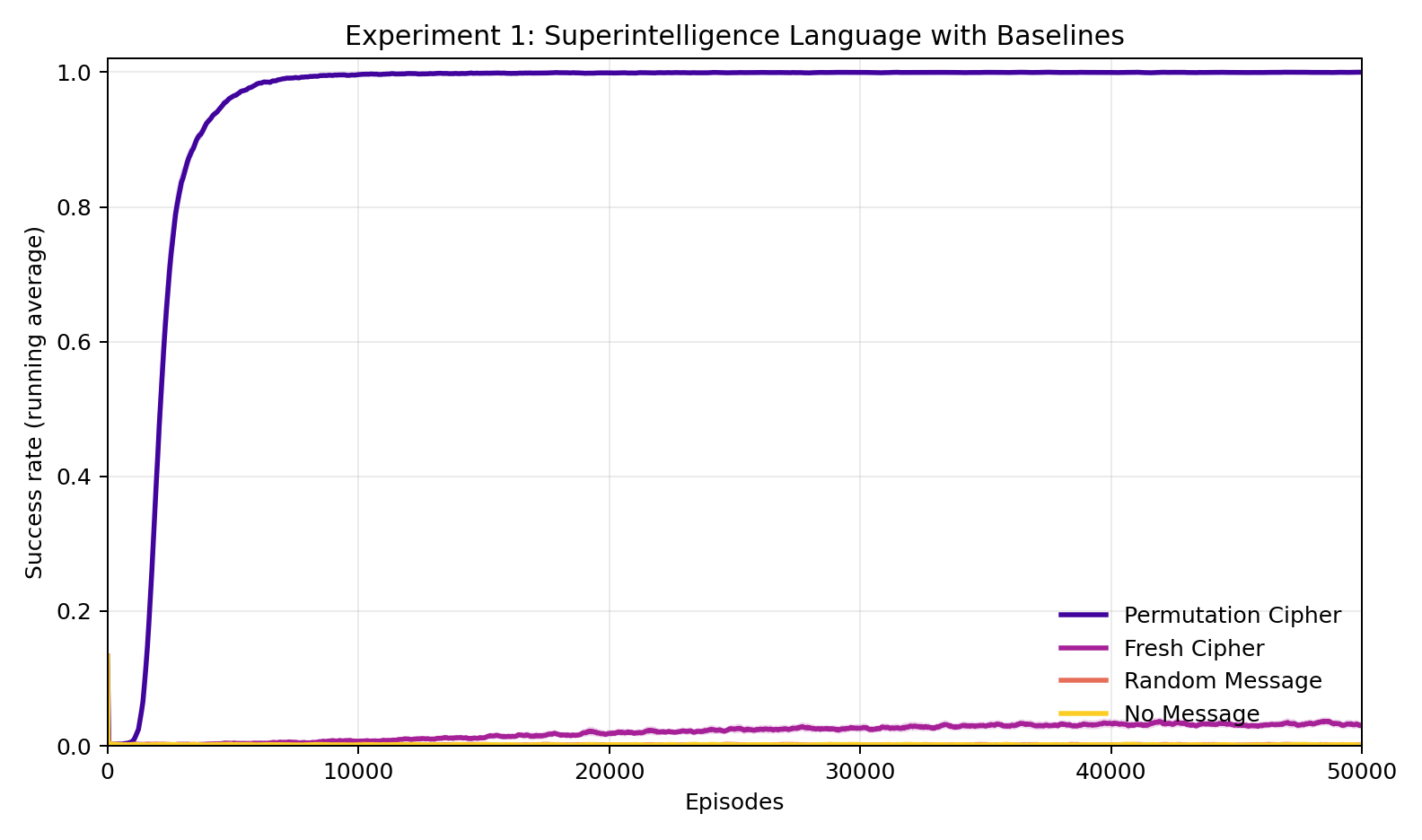
The permutation cipher (\(K = 1\)) reaches 100% success rate in roughly 2,355 episodes and stays there. Note, if there was no language barrier, then the shortest path would be understandable by Human, and so the learning curve would be a step function at episode 1. The three other conditions — fresh permutation, random message, and no message — remain near zero throughout. The fresh permutation, despite encoding the correct path every episode, converges to only 3.4% success: slightly above the random and no-message baselines, consistent with the hypothesis that a small amount of graph structure is learned across episodes even when the language cannot be decoded. The gap between the fixed permutation and the fresh permutation is the central finding: correctness without consistency is nearly worthless. The sensing signal provides gradient, but gradient needs something stable to latch onto.
Experiment 2: Does difficulty scale with the size of the environment?
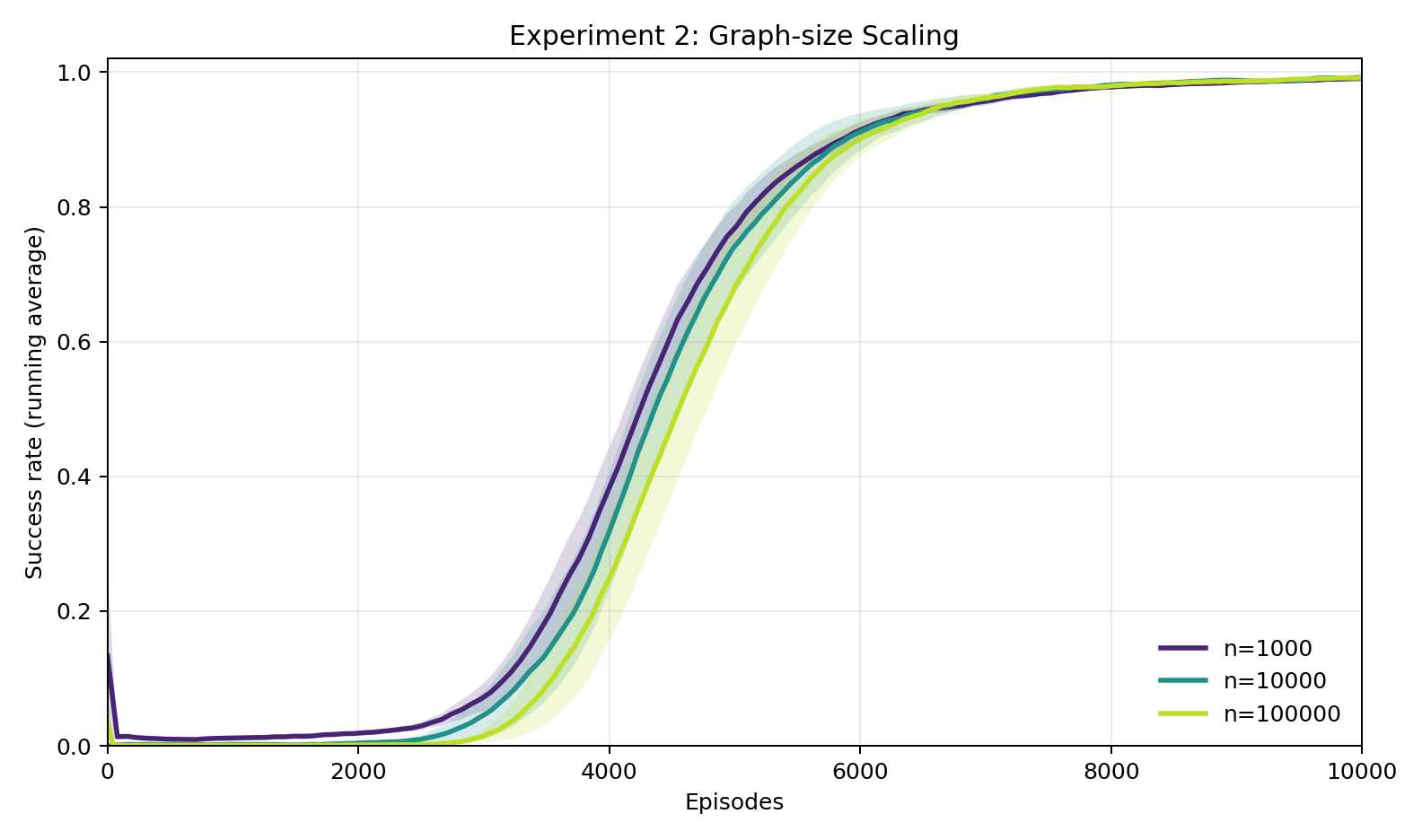
Across three orders of magnitude in graph size (\(n = 1{,}000\), \(10{,}000\), and \(100{,}000\)), the learning curves are very similar (note the compressed x-axis compared to experiment 1). All three reach 100% success, and the episode counts to 80% success differ by little. This confirms that the bottleneck is decoding Superintelligence's cipher, not navigating the graph. Once the Human has internalized the permutation — a task of fixed complexity regardless of \(n\) — navigation follows trivially.
Experiment 3: What if Superintelligence occasionally lies?
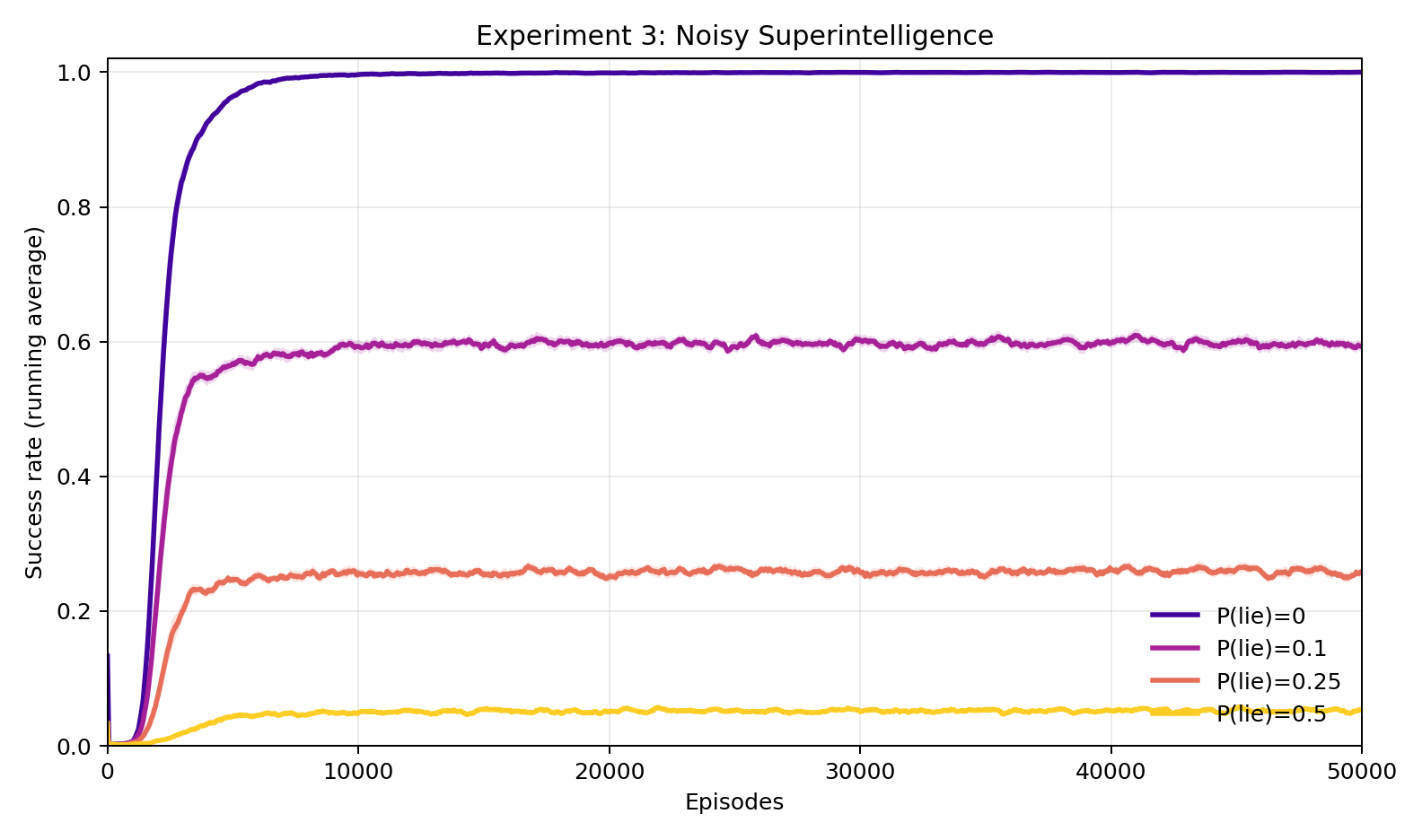
Here we corrupt Superintelligence's message at the source: with probability \(p\), each token is replaced by a uniformly random one. At \(p = 0.1\), success rate stabilizes around 60%. This is a substantial drop, but still constitutes meaningful guidance. At \(p = 0.25\), it falls to 26%, and at \(p = 0.5\) (effectively a random message half the time) it reaches only 5.3%. There is no sharp threshold: degradation is smooth and roughly proportional to the fraction of reliable tokens. The Human learns to extract whatever consistent signal exists, and performance scales accordingly.
Experiment 4: What if the sensing signal itself is noisy?
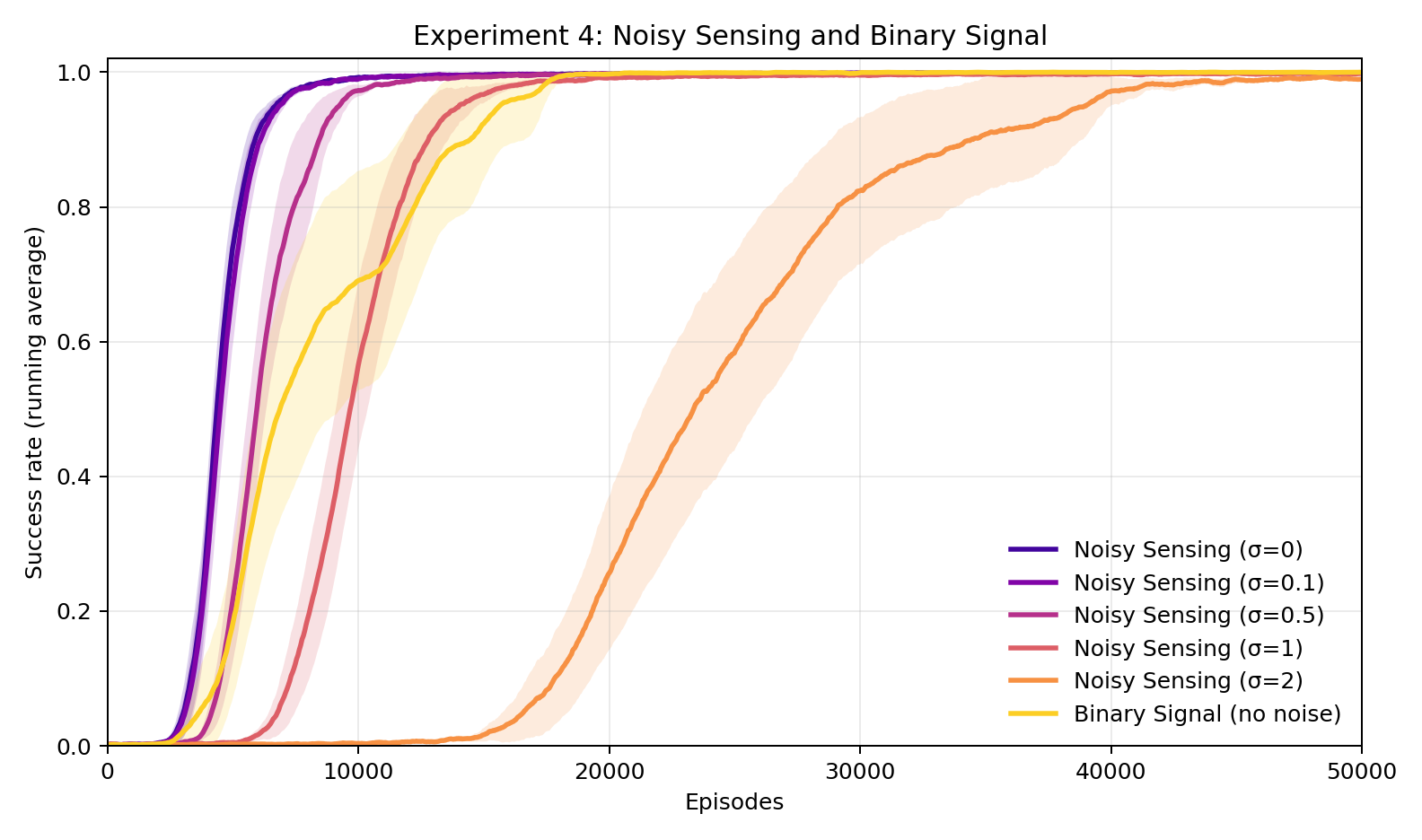
Rather than corrupting Superintelligence's message, here we add Gaussian noise with standard deviation \(\sigma\) to the reward signal itself. The result is strikingly robust: even at \(\sigma = 2\) — where the noise magnitude exceeds the typical per-step reward — the Human still reaches 99.8% final success, though it takes roughly 50,000 episodes compared to 10,000 at \(\sigma = 0\). The binary sensing condition (terminal reward only, no per-step signal) also succeeds, reaching 100% in about 18,000 episodes. Verifiability does not require a clean or granular signal — it requires only that signal exists. Interestingly, the binary signal with no noise is somewhere in between as useful as the dense signal with \(\sigma = 0.5\) and \(\sigma = 1\).
Experiment 5: How complex can Superintelligence's language be?
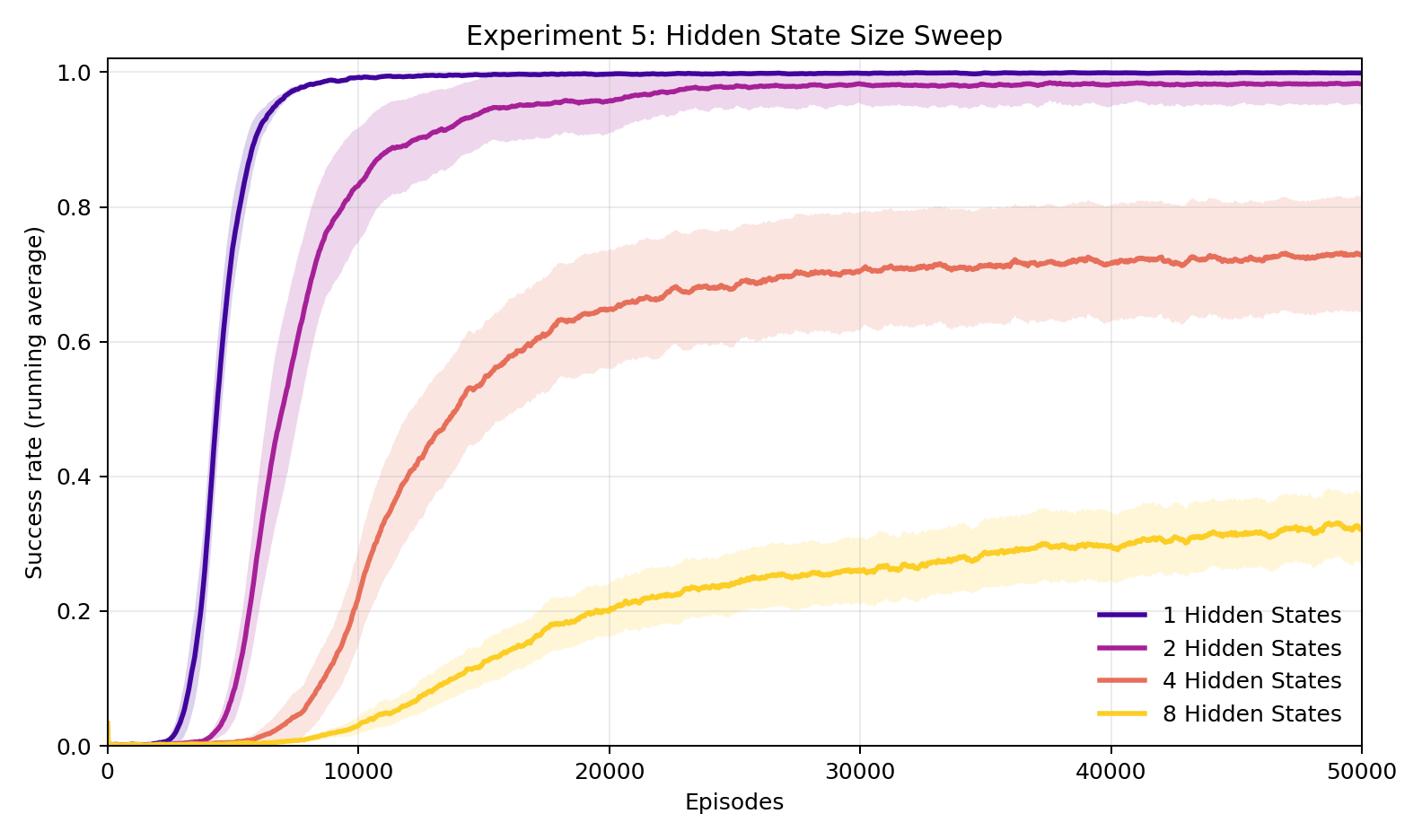
Here we sweep \(K\), the number of hidden states in the FST. For \(K > 1\), the MLP interpreter is replaced with a GRU, which can maintain state across steps within an episode and thus track position in the FST cycle; the MLP fails entirely for \(K > 1\). With \(K = 1\) (fixed permutation), the Human reaches 100% reliably. With \(K = 2\), average final success is 98.4% and 29 of 30 seeds reach 80%, so the task is harder but still largely solved. With \(K = 4\), average final success drops to 74.4% with only 13 of 30 seeds reaching 80%. With \(K = 8\), the interpreter largely fails, averaging 37.2% with only 1 of 30 seeds reaching 80%. The task is harder with larger \(K\) because interpreting any single token now requires knowing its position in the message and which of the \(K\) ciphers applies, which is information the GRU must learn jointly with the mapping itself.
Experiment 6: How does difficulty scale with the number of choices per step?
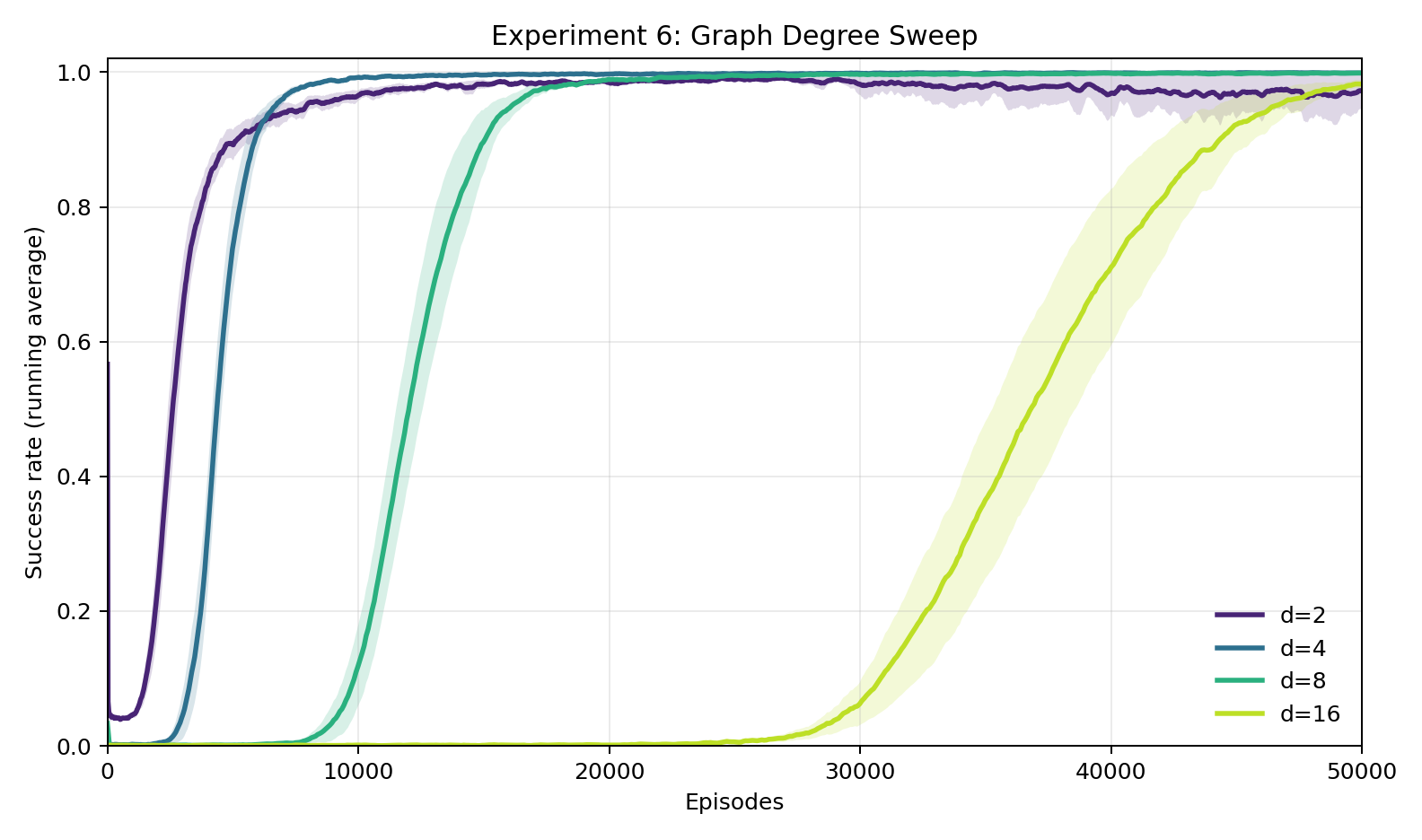
Finally, we sweep the graph out-degree \(d\). The number of outgoing edges at each node, and therefore the number of actions the Human must choose among. All four values (\(d = 2, 4, 8, 16\)) eventually reach near-100% success (non-convergence of \(d=2\) is likely noise from a hard seed), but the episodes to 80% scale dramatically: on average, 1,542 episodes for \(d = 2\), 5,030 for \(d = 4\), 12,744 for \(d = 8\), and 39,556 for \(d = 16\). Note, these numbers are avg(number of episodes to 80% success) across 30 seeds, so they do not lineup with the plot, which shows average learning curves. This kind of scaling is expected: a larger action space means a harder decoding problem (more permutation symbols to learn), and the cipher has more entries to get right before navigation reliably succeeds.
Discussion
I believe that the central finding of this research is that it works. In our simple model, A Human with zero knowledge of Superintelligence's language learns to perfectly interpret its directions, purely from a progress sensing signal. The JSG prediction is confirmed: this sort of verifiable feedback is sufficient for a weaker agent to learn to use a stronger one, even when the stronger agent's outputs are completely opaque.
Our experiments clarify what makes this possible. The encoding must be consistent: a Superintelligence that gives the right answer every time but changes its language too unpredictably is barely more useful than one sending pure noise. JSG requires only that a working interpreter exist, while the practical learnability we shoot for requires that the encoding be stable enough for the interpreter to generalize across episodes. It seems that consistency is the bridge between theoretical achievability and practical learnability.
Several design choices make the experiments we conducted easier than the general problem. The interpreter receives normalized distance as an input feature, not just as reward. This is richer than what JSG assumes. The graph is also regular. Additionally, the FST model for Superintelligent language, while tunable in complexity, is still structured, and definitely better models may exist. Finally, the goals we care about in alignment like safety, honesty, and long-term benefit are not as cleanly verifiable as reaching a target node. It remains to be seen whether real world verifiable goals can be achieved through opaque communication. Our research suggest they can. But how much of what we actually care about admits verifiable proxies?
If there is a single takeaway that I have so far, it is this: let's invest in verification! It appears that if humans can reliably check whether progress is being made towards our goals, then we will be able to leverage a friendly superintelligence in a goal-oriented way, even if we cannot actually translate its language.